实现模型周边感应功能
需求目标
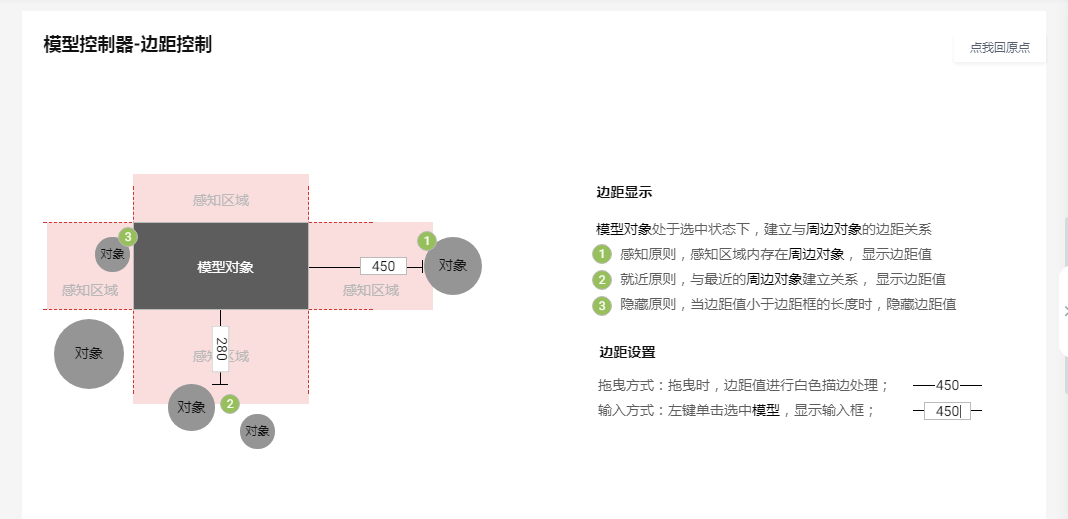
需要在模型移动过程中感知到模型一个“十”字形的范围内的所有模型,如有相交则标注相隔距离,如果没有感知到阻挡模型,则显示到墙体的距离。
方案思路
一开始,当我拿到这个需求的时候,我的第一想法就是在模型的周围做四条射线,如果和其他模型有相交点,则以相交点的位置 做连线。
下一秒就产生了一个问题,如图。
在这样的情况下,标注线应该标注最近的那一个模型,但是却标注到了另外一个模型。
但有一点是母庸质疑的,那就是他需要有四条标注线,要分开来一条一条处理。
接着,拿其中一条边来说,是否应该要找到最近的一个模型?
这两种情况都证明了上面这种思路的问题所在,要考虑方向